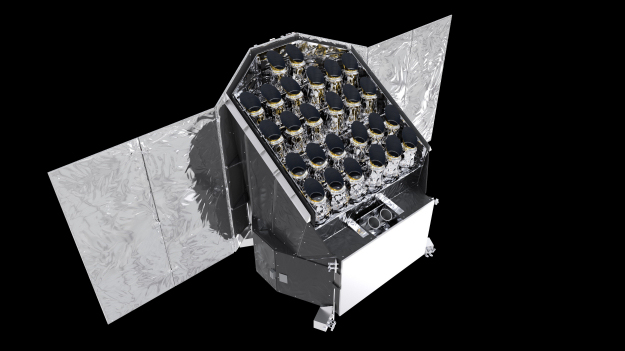
The PLATO Payload comprises 26 Cameras and the on-board Data Processing System.
The Cameras mounted on the Optical Bench make the PLATO Payload Module.
The PLATO instrument concept is based on a multi-telescope approach, driven by science requirements calling for a very large field of view coupled with a sensitivity of a 1 m-class telescope.
The adopted solution includes:
- 24 Normal Cameras
- for stars fainter than mV = 8,monitored with a cadence of 25 s.
- 2 Fast Cameras
- for stars in the magnitude range 4 to 8, monitored with a cadence of 2.5 s. Each of the two Fast Cameras is optimised for the red or blue part of the optical spectrum, respectively
Each Camera is made by a 20 cm class dioptric telescope feeding 4 CCDs in their focal plane, each one with 4510 x 4510 18 μm pixels. The CCDs for the Normal Cameras are e2v CCD 270 full frame type, while for the Fast Cameras are e2v CCD 270 frame transfer type.
Each Camera has a 1037 deg2 effective field-of-view (619 deg2 for each of the two Fast cameras, because of the frame transfer CCDs).
The 24 Normal Cameras are arranged in four groups of 6 Cameras. All 6 Cameras of each group have exactly the same field-of-view, and the lines of sight of the four groups are offset by a 9.2° angle from the +Z PLM axis. This particular configuration allows surveying a total field of about 2232 deg2 per pointing, with various parts of the field monitored by 24, 18, 12 or 6 telescopes. This strategy optimizes both the number of targets observed at a given noise level and their brightness. It is assumed that the satellite will be rotated around the mean line of sight by 90° every 3 months, resulting in a continuous survey of exactly the same region of the sky.
To the Payload implementation contributes several teams, coordinated by the Payload Management & Engineering Office at OHB. For more information visit the Payload Teams section.
