After identification of a planet candidate, ground-based follow up observations are needed to confirm and characterise the planetary nature of the companion. In fact, for most candidates accurate masses can only come from spectroscopic radial velocity observations since accurate masses from transit timing variations (TTVs) require co-planar planetary systems which will form only a small sub-set of PLATO detections. To ensure the determination of planetary masses for the most interesting PLATO planets (the core sample with bright host stars), the mission includes an organised ground-based follow-up campaign. The team performing these observations (GOP Team) will be subject to an open call by ESA. The GOP Team will organise their respective telescope resources. For the purpose of a feasibility study in terms of available telescope resources to European astronomers, the PMC has made an estimate about the required resources during Phase B1 presented here. Later on, the GOP Team selected by ESA may be able to raise even larger resources, e.g. by included non-European resources which are not considered here, and/or by prolonging the follow-up over a time period longer than what is assumed here as part of the PLATO mission duration.
In general, the ground-based follow-up observations are divided into two kinds:
- Observations designed to detect false positives (filtering observations).
- Observations needed to characterise the planetary orbit (radial velocity observations).
The filtering observations will be mostly carried out on existing relatively small telescopes while the radial velocity (RV) observations will need the best and most stable instruments coupled to our premier telescopes. Hence, the importance of an efficient filtering campaign cannot be over stated. Intuitively we would also expect that the time required with our largest telescopes will be dominated by observations of the smallest (and presumably lightest) planets.
Filtering observations: the elimination of astrophysical mimics
Astrophysical false alarms, mainly due to eclipsing binaries, were shown to outnumber true transiting planets in ground-based and space-based photometric surveys for planets. In the case of PLATO, this problem is minimised by the brightness of the targets (i.e. Santerne et al. 2013). Complementary techniques are also foreseen in the PLATO project to identify astrophysical false alarms from the detailed analysis of light curves, the analysis of centroids to identify blended eclipsing binaries, the comparison of transits at different colors from the fast cameras, as well as the photometric, high resolution imaging, and spectroscopic ground-based follow-up observations. Experience gained by Kepler, K2, CoRoT and TESS missions will be extremely valuable for the removal of false positives (e.g. Torres et al. 2011; Díaz et al. 2014; Santerne et al. 2015).
False-positive rates depend on the set-up of the transit survey considered (PSF size, sampling, etc), on the characteristics of the host stars (e.g. magnitude, position with respect to the galactic plane, activity level, etc), and probably on the type of planets considered (radii, period). For Keplerthe number of false positives remaining after a careful analysis of the precise light curves has been estimated by Fressin et al. (2013) to be about 10%. It’s worth noting that the false alarm rate from Keplercandidates is still somewhat controversial (Santerne et al. 2016). Understanding the PLATO false-alarm rate is not straightforward as, while the availability of detailed preparatory data from Gaiaand TESS would certainly act to improve the initial target selection, the large PLATO PSF would work in the opposite way. Given this uncertainty, we chose an extreme value of a factor ~2 for our estimate (i.e., there are as many false positive cases as planetary systems). For the P1 and P5 samples we estimate some ~1200 planets with host star brightness V[11 – sufficient for RV follow up – considering the baseline observing scenario with two long-duration pointings. Of these some ~770 have radii <2REand could be rocky in nature and maybe ~120 are in the habitable zone of their host stars – the main targets for PLATO. This estimate increases to ~2700 (~1800 small planets) for an alternative observing scenario with 1 long-duration pointing and 6 step-and-stare pointings. Hence, being conservative, we may expect to filter some 5000 candidate transits over the nominal mission.
A typical set of filtering observations on stars of this brightness could be:
- Low-precision spectroscopy (1‒2m telescopes), 3320 min (including overheads).
- High-resolution imaging (e.g. lucky imaging on 2m telescopes), taking 30 min per target (including overheads).
- On and off transit photometry (1‒2m telescopes), 2320 min (including overheads)
- High-resolution spectroscopy (HARPS like instrument, 4m telescopes), 3320 min (including overheads).
- Rossiter-McLaughlin (RM) observations (ESPRESSO like instrument, 8m telescopes) for the smallest objects in the HZ: 10h per target (including overheads). In special cases, for the faintest targets, the E-ELT + a HIRES-type instrument would be needed.
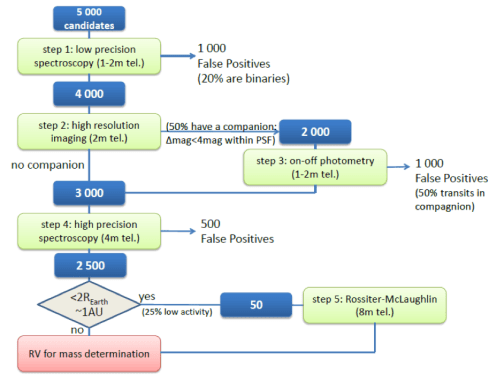
An example filtering strategy for PLATO targets with expected success rates for each type of observation. Starting from ~5000 candidates we would expect to recover ~2500 candidates.
This is a maximum set of observations per target. During the process, false-alarms are identified and the number of targets for the respective next filtering steps reduces. The process should lead at the end at losing half of the candidates, according to our initial hypothesis. As a first “working” guess, we conservatively chose that:
- 20% of the candidates will turn out to still be binaries undetected by the light curve vetting when doing moderate precision RV observations (Step 1), i.e. 80% of the candidates will still be going down the list,
- 50% of the candidates will have a companion within the PSF with magnitude difference smaller than 4 in the PLATO PSF (Step 2), requiring then on-off photometry (Step 3), and that in 50% of the cases, the transit will be a diluted one (deeper transit on the companion),
- 25% of the small planets on long period orbits will have an activity level (Step 4) allowing for credible RM effect to be observed (see below).
We note that additional filtering methods (e.g. PLATO centroids), are not considered here. Furthermore, many of the contaminating targets will be known from Gaia allowing further optimisation of the filtering process.
Overall this would require some 835 nights spread over several years on 1‒2m telescopes and a further 300 nights with 4m telescopes. Nominally an additional 50 nights of 8m telescope time would be needed for the RM observations but we expect few transits of these longer period systems will be accessible to our 8m telescopes as the likelihood of transits being well placed for observation from a specific location are slim. For the baseline observing scenario of two long-duration pointings, the required number of nights for filtering observations is half of the above values (see also Organisation of Ground-based Observation Programme).
Optimisation of the radial velocity follow-up
The mass of the planet candidates is determined through a Keplerian modelling of the observed radial-velocity variation of the central star. The number of observations required for the mass determination, at a given precision, depends on the precision of the measurements, on characteristics of the star, and on planet parameters. In order to make the description “uniform” with regard to the mentioned parameters, a convenient approach is to suppose that the planet mass will be characterised when we have gathered 20 “phase points” along the orbit. Such “phase points” can be individual or binned measurements. Their “cost” (integrated telescope time to obtain them) and “efficiency” (actual equivalent precision of the binned radial velocities) will then depend on:
- the planet orbital period: possible size of the bin cannot be bigger than P/20 if we want 20 points in phase to describe the orbit;
- the planet mass;
- the precision of individual radial-velocity observations. This includes instrumental precision, photon noise and intrinsic stellar effects (granulation, activity, etc). Note here that below a few tens of cm/s this is completely dominated by stellar effects and thus the instrumental intrinsic precision is of secondary importance.
“Equivalent-precision” radial velocity measurements: beat the noise by “brute force”
Instrumental stability of new-generation, high-resolution spectrographs is at the level of cm/s (ESPRESSO: <10cm/s) to tens of cm/s (HARPS: 50cm/s). In order to fully take advantage of these instrumental capabilities the photon noise level has to be achieved, i.e. more stable instruments are installed on larger telescopes. For example, typical photon-noise benchmarks for the ESPRESSO on the VLT are 10 cm/s in 15 min for a V=8 star, or 20 cm/s in 1 hour for a V=11 star.
The same level of precision cannot be reached for all stars due to various sources of stellar intrinsic limitations: brightness, spectral type, luminosity class, and especially activity level. Usually, the stellar contribution to radial-velocity uncertainties is dominated by activity-related effects. Stellar oscillations and granulation are expected to contribute at the level of a few tens of cm/s, even for quiet stars. This is a serious concern for mass determination of low-mass planets on longer-period orbits, but, although stellar noise is the major limitation on very high precision Doppler measurements, adequate observing strategies help mitigate its effect down to the required “equivalent precision” necessary to detect Earth-mass planets in the habitable zone of G dwarfs (Dumusque et al. 2011a,b). Note that slightly more massive planets or similar-mass planets around later type stars will much easier to characterise.
For low activity level (most suited for Earth-type planets), the observed combined effect of the different stellar “noises” has been estimated through simulations drawn from real HARPS asteroseismology data (for oscillations and granulation, i.e. for timescales up to ~1 day) and from the modelling of families of spots on the star surface for different spectral types and various level of stellar activities[1]. These results are discussed in detail in the Definition study documentation, but demonstrate that even for the lowest mass planets the required accuracy can be achieved by averaging sufficient radial velocity measurement (“equivalent RV precision”) and still maintaining sufficient orbital phase resolution.
For the quietest stars an “equivalent precision” as low as 7 cm/s can be obtained. It however degrades when the activity level goes up. We do not currently know which stars PLATO will actually observe, but we assume their activities levels follow those in the solar neighbourhood drawn from the HARPS GTO volume-limited sub-sample. The distribution shows that 24% of the stars have log(R’HK) < ‒5.0 (non-active Sun) and 50% are less active than the average Sun (log(R’HK) = ‒4.9).
[1]We implicitly suppose here that there is no significant stellar noise with timescale between the rotational period of the star and 1 year.
References
PLATO – Revealing habitable worlds around solar-like stars
Definition Study Report, ESA-SCI(2017)1, April 2017

{kind=link}